Tuesday, Oct 01 2024
Frontiers Gait Optimization Method for Humanoid Robots Based on

By A Mystery Man Writer
Frontiers Pronto: A Multi-Sensor State Estimator for Legged

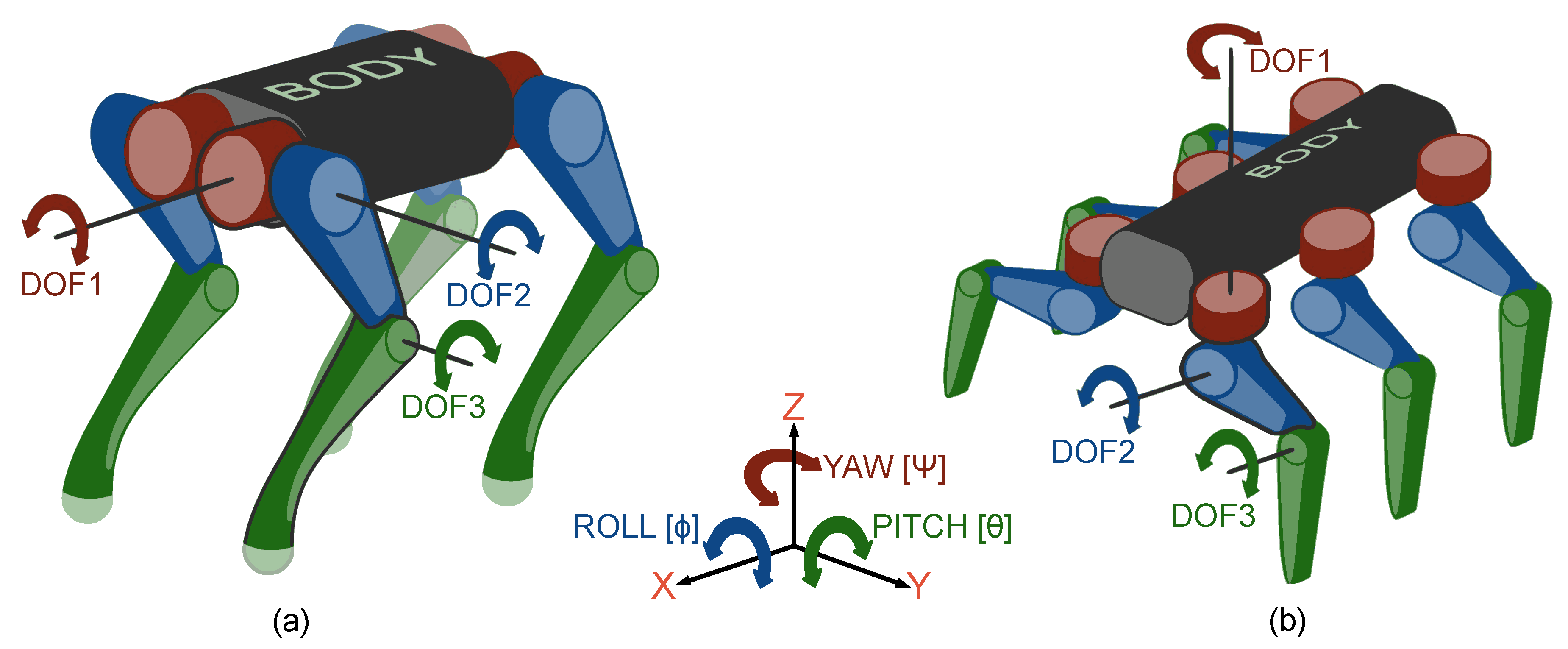
Smart Gait: A Gait Optimization Framework for Hexapod Robots
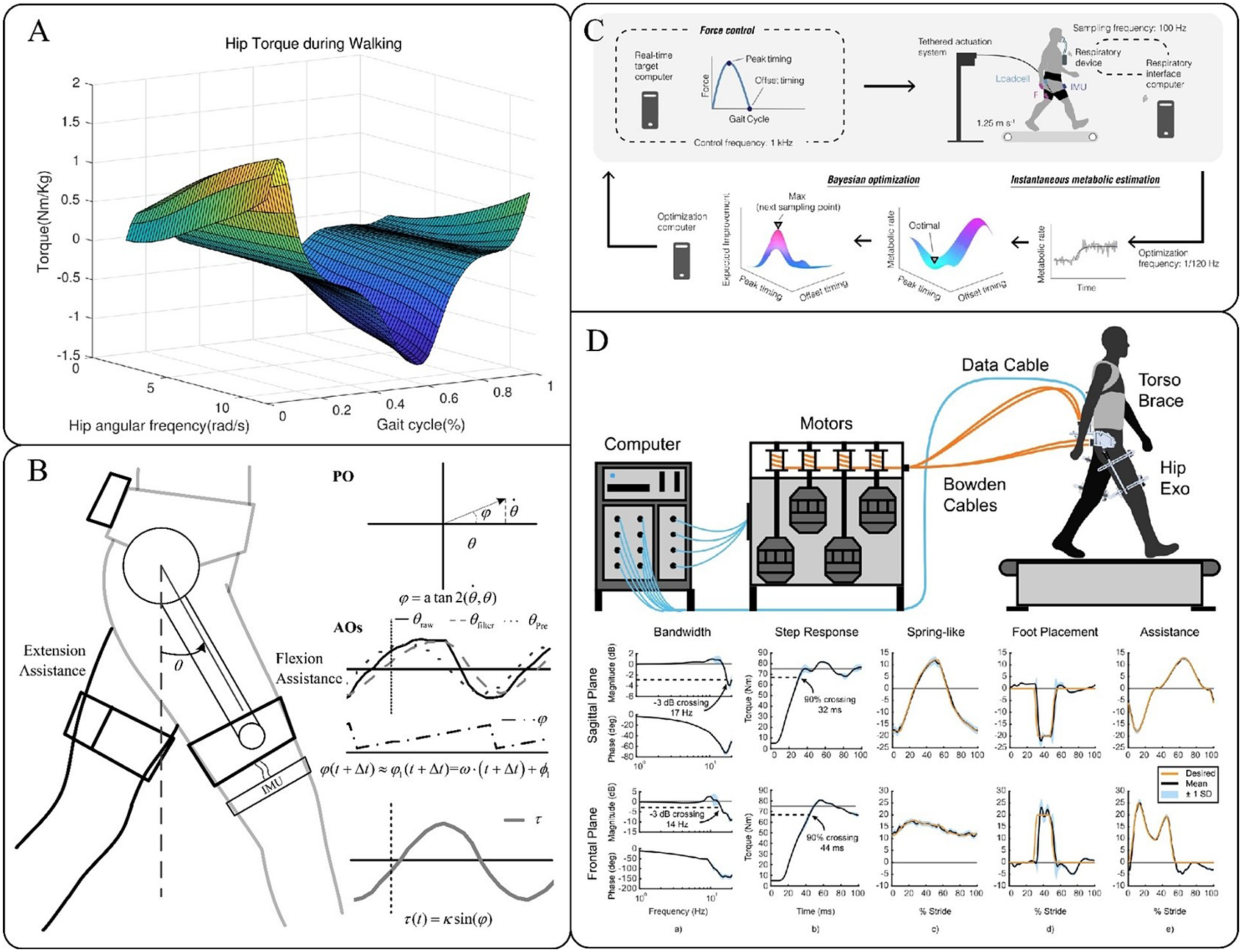
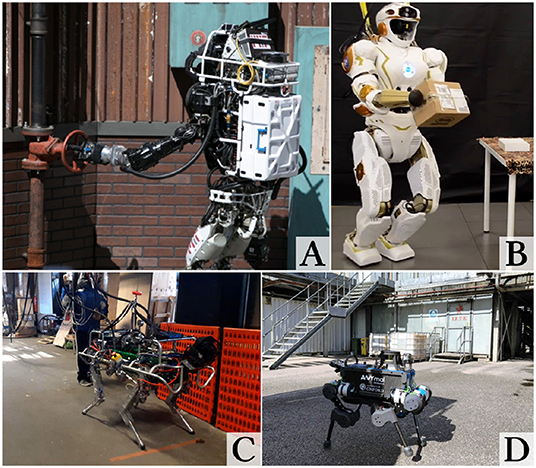
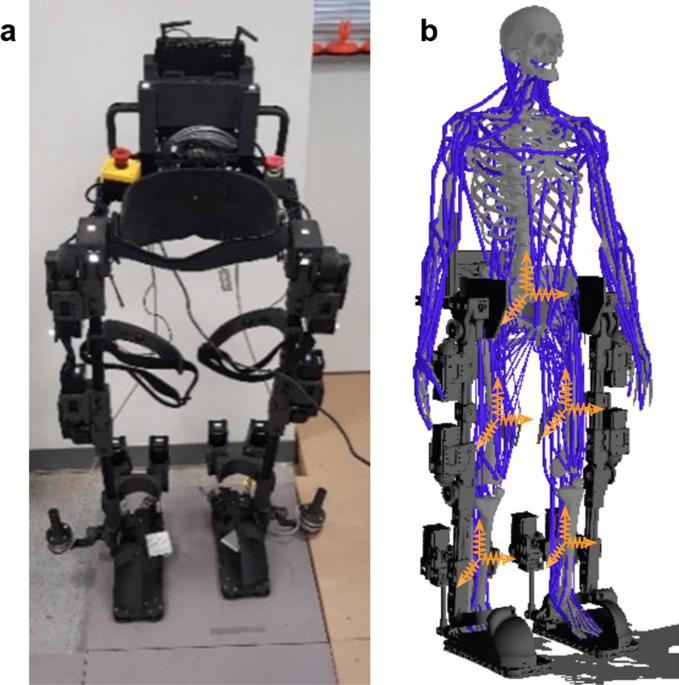
Current developments of robotic hip exoskeleton toward sensing
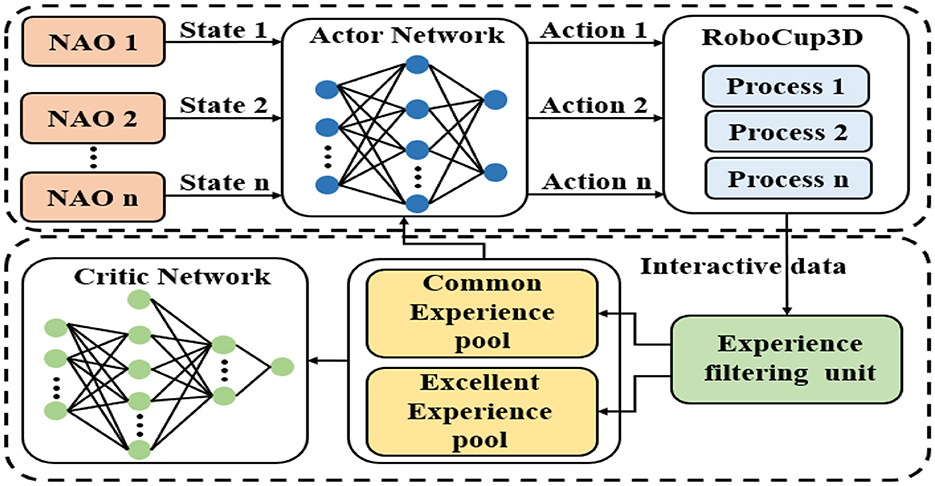
Frontiers A parallel heterogeneous policy deep reinforcement

Applied Sciences, Free Full-Text
Applied Sciences, Free Full-Text
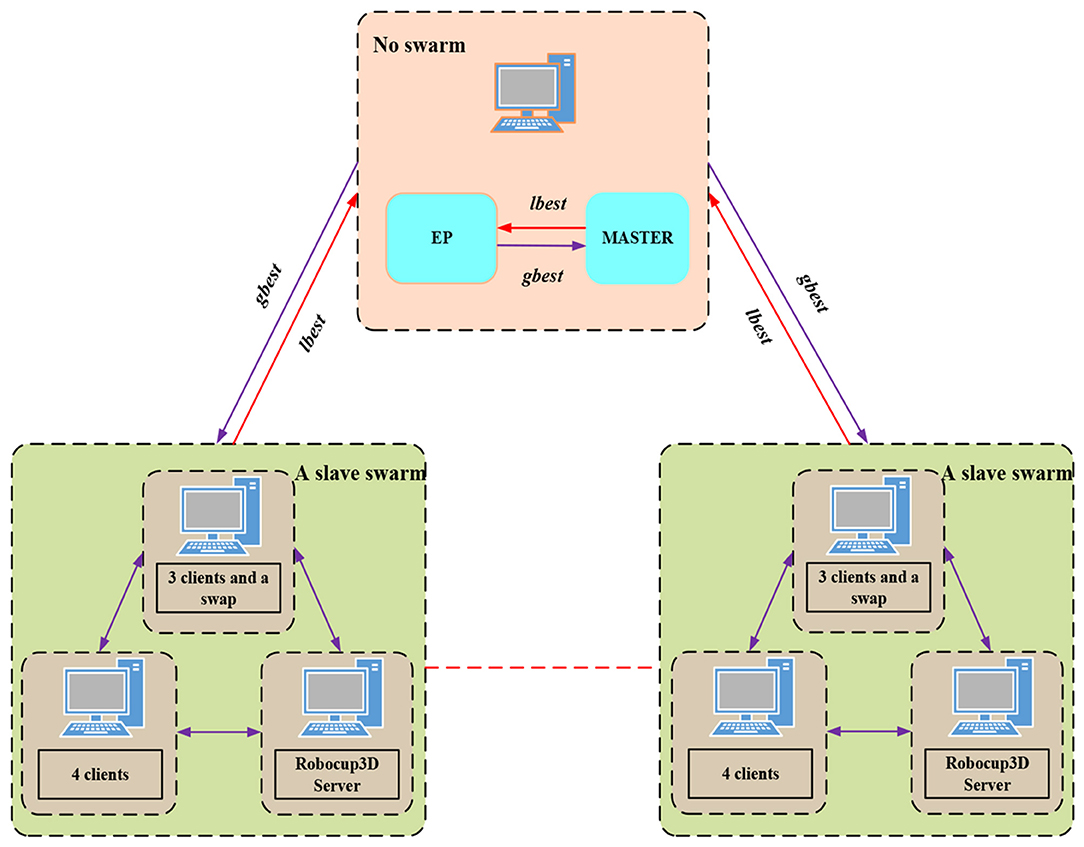
Frontiers Gait Optimization Method for Humanoid Robots Based on
Robust walking control of a lower limb rehabilitation exoskeleton

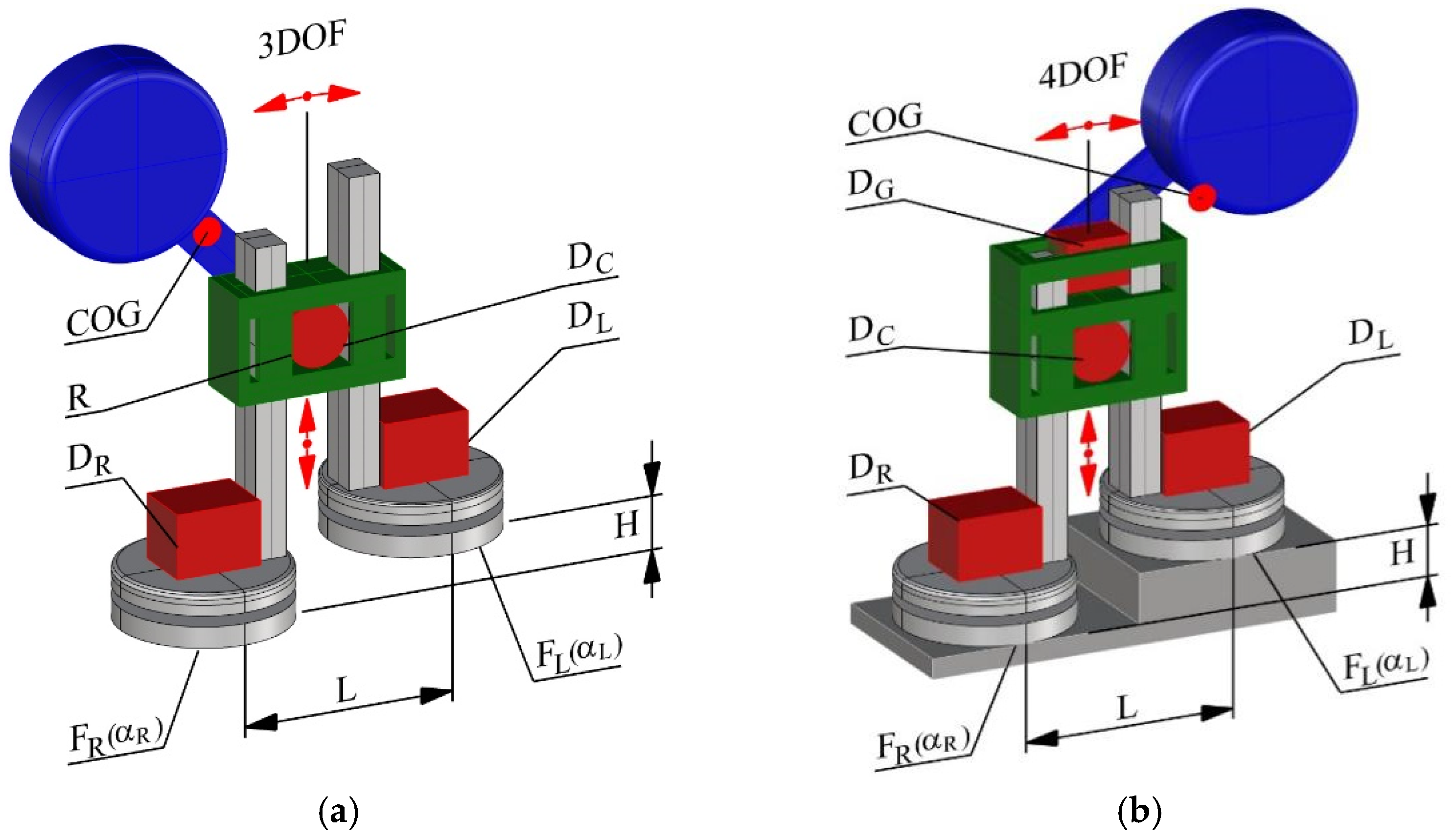
PDF] Tello Leg: The Study of Design Principles and Metrics for
Sensors, Free Full-Text
Related searches
- 5 Lesser-Known Apple Health Features Worth Using
- Daiwa DAIWA TECHNOLOGY

- Interpreting Spatiotemporal Parameters, Symmetry, and Variability in Clinical Gait Analysis
- Frontiers A Review of the Potential of Virtual Walking Techniques for Gait Rehabilitation
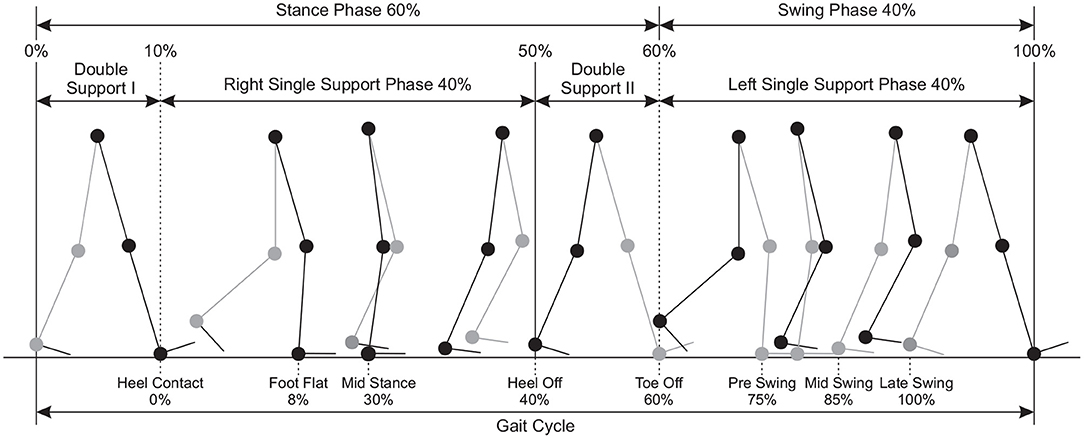
- Gait Cycle phases and sub-phases according to [19].
Related searches
- How to Become Flexible: Use Yoga Props! (Photo Tutorial)

- JDEFEG Big Bust Lingerie for Women Women Lingerie Plus Size Open Back Lingerie Lace Sleepwear Lace Lingerie for Women Two Piece Spandex Blue Xxxl

- Knee Sleeve, Tourmaline Acupressure Self-Heating Shaping Knee Sleeves and Socks, Tourmaline Compression Knee Brace with Thermal Circulation Slimming Socks, Detox Sculpting Knee Pad Best Gifts for Women and Men Arthritis Pain (X-Large)

- NEW Danskin Women's Reflective High Rise with Pockets Capri

- P+caRe Padded Plantar Fasciitis Night Splint (C3018) (STD)

©2016-2024, slotxogame24hr.com, Inc. or its affiliates