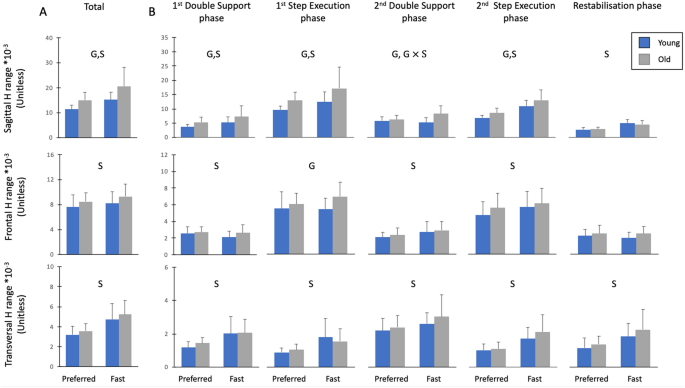
The gait cycle has two phases: about 60-percent stance phase and about

By A Mystery Man Writer

The ankle joint's frontal motion (angular and velocity evolution)

The gait cycle has two phases: about 60-percent stance phase and about

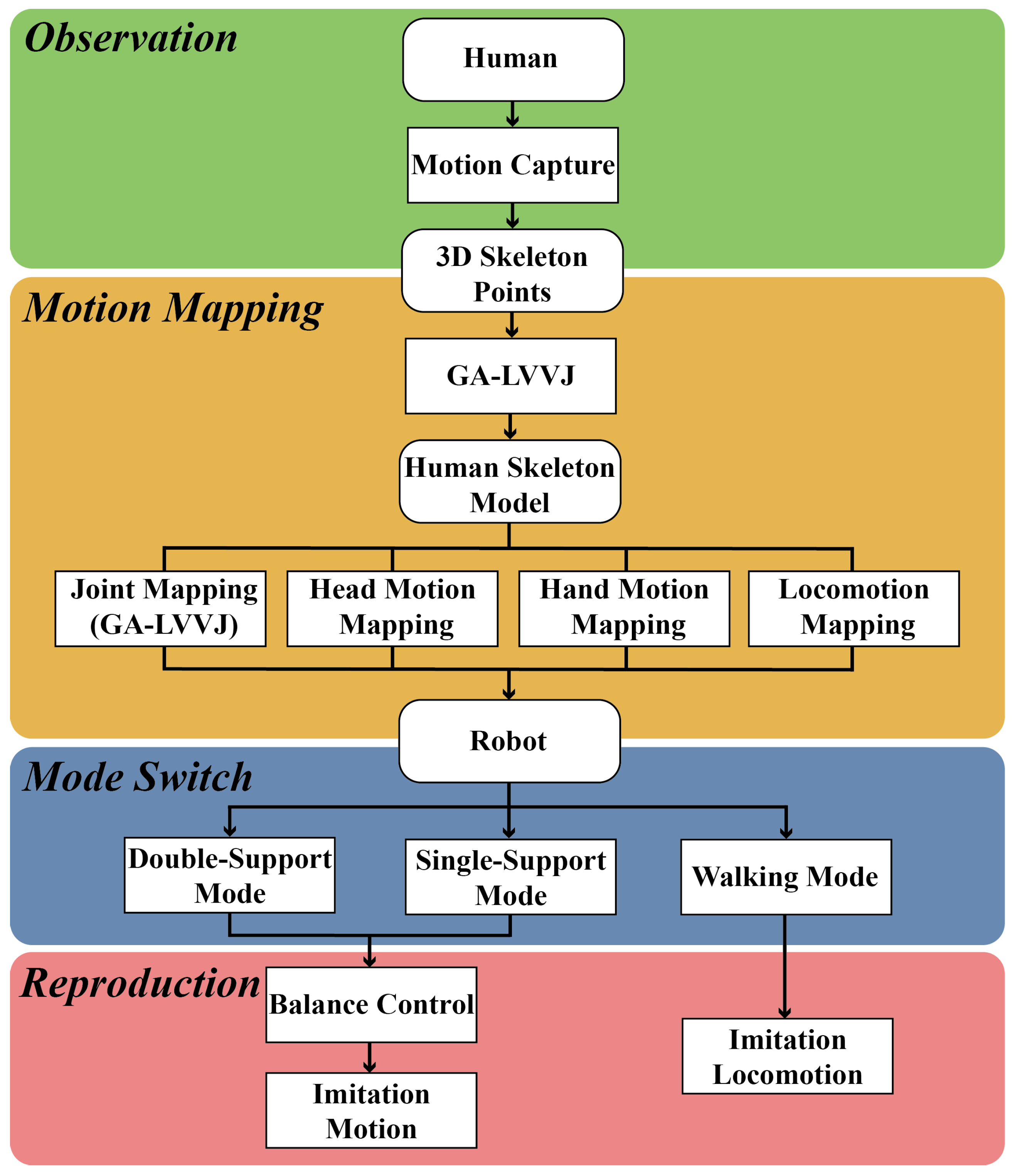
Stabilizer architecture. A sensorial system of the robot consisting of

Rh-1 Sagital Kinematics Division (SKD). Solving the kinematics problem

PDF) The Rh-1 Full-Size Humanoid Robot: Control System Design and Walking Pattern Generation
Block diagram of the gain-scheduling motion controller. The online part

The gait cycle has two phases: about 60-percent stance phase and about
Human leg motion, Sagital view.

3: The gait cycle has two phases: about 60-percent stance phase and

PDF) The Rh-1 Full-Size Humanoid Robot: Control System Design and Walking Pattern Generation

M. ARBULU, Reseacher, PhD, Corporación Universitaria del Huila, Facultad de Ingeniería

The gait cycle has two phases: about 60-percent stance phase and about

PDF) The Rh-1 Full-Size Humanoid Robot: Control System Design and Walking Pattern Generation

- SPORTS BRA WITH REMOVABLE CUP - Noritex

- Out From Under Modern Love Corset Urban Outfitters Australia - Clothing, Music, Home & Accessories

- LT.Rose Butt Lifter Shapewear Shorts Tummy Control Push Up Panties for Dresses Woman High Waist Control Brief Calzon Levanta Cola y Gluteo Faja para

- Airlift Intrigue sports bra in brown - Alo Yoga

- How to Use Sound.me Boost Codes for Explosive TikTok Video Views
